Morton Encoding/Decoding a Point Cloud
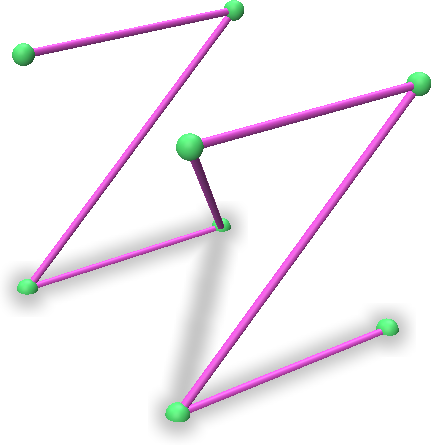
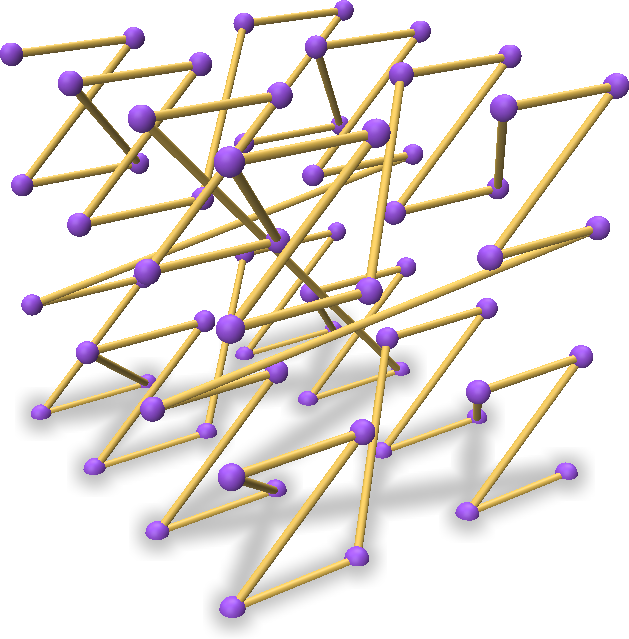
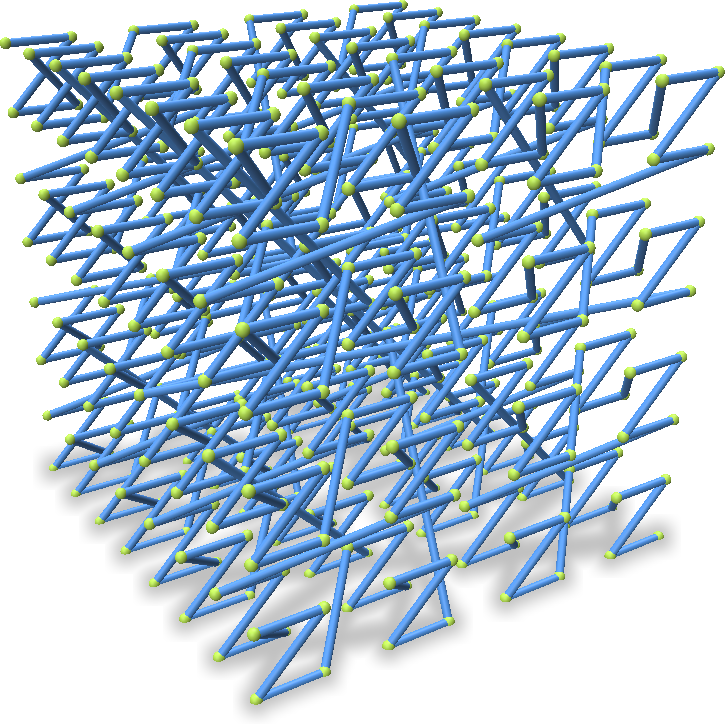
Point Cloud Utils has a number of tools for operating on Morton Encoded point clouds. Morton encoding works by projecting points onto a space filling Z-Curve (illustrated below), and recording the distance along this curve from the origin.
Morton Encoding point clouds has a number of useful application, such as approximate-k-nearest neighbor search, locality-sensitive point hashing, and point sorting, to name a few.
To morton encode a point cloud, you must first convert the point coordinates to integers via quantization. The Point Cloud Utils morton coding utility uses 64 bits and can thus represent points in \(x \in [-1048576, 1048576]^3 \subset \mathbb{Z}^3\).
Morton Encoding and Decoding Points
You can quickly encode/decode points to/from Morton codes by quantizing them to integer coordinates and calling morton_encode/morton_decode.
import numpy as np
import point_cloud_utils as pcu
pts = pcu.load_mesh_v("truck.ply")
# quantize points to bins of size 1/128
# NOTE: quantized point coordinates must lie between -1048576 and 1048576
eps = 1.0 / 128.0
pts_quantized = (pts / eps).astype(np.int32)
# Convert points to morton codes
# morton_codes has shape [pts.shape[0],] (one code per point)
morton_codes = pcu.morton_encode(pts_quantized)
# Decode morton codes back to integer coordinates
pts_decoded = pcu.morton_decode(morton_codes)
Approximate K-Nearest-Neighbor Search with Morton Coding
Finding the nearest points in Morton space to a set of query points is a very fast aproximate KNN algorithm. This can be done via morton_knn:
import numpy as np
import point_cloud_utils as pcu
# Load target point cloud
pts = pcu.load_mesh_v("truck.ply")
# Sample random KNN query points in a bounding box 1.1x larger than the object
query_pts = np.random.rand(100, 3) * (pts.max(0) - pts.min(0)) * 1.1 - pts.min(0)
# quantize points to bins of size 1/128
# NOTE: quantized point coordinates must lie between -1048576 and 1048576
eps = 1.0 / 128.0
pts_quantized = (pts / eps).astype(np.int32)
query_pts_quantized = (query_pts / eps).astype(np.int32)
# Convert points and query points to morton codes
# morton_codes has shape [pts.shape[0],] (one code per point)
morton_codes = pcu.morton_encode(pts_quantized)
query_codes = pcu.morton_encode(query_pts_quantized)
# Number of neighbors per point
num_nbrs = 7
# knn_idx is an array of size [query_pts.shape[0], num_nbrs]
# where knn_idx is a vector of indices into pts/morton_codes
# of the approximate k nearest neighbors (sorted)
knn_idx = pcu.morton_knn(morton_codes, query_codes, num_nbrs)
Sorting Points Along a Morton Curve
Morton codes can be used to impose a sort order on 3D points by first quantizing them and the quantized points in Morton order.
import numpy as np
import point_cloud_utils as pcu
pts = pcu.load_mesh_v("truck.ply")
# quantize points to bins of size 1/128
# NOTE: quantized point coordinates must lie between -1048576 and 1048576
eps = 1.0 / 128.0
pts_quantized = (pts / eps).astype(np.int32)
# Convert points and query points to morton codes
# morton_codes has shape [pts.shape[0],] (one code per point)
morton_codes = pcu.morton_encode(pts_quantized)
# Permute the points to sort them by their morton code
sorted_pts = pts[np.argsort(morton_codes)]
Adding and Subtracting Coordinates in Morton Space
You can add and subtract Morton encoding of points directly via morton_add and morton_subtract
import numpy as np
import point_cloud_utils as pcu
pts = pcu.load_mesh_v("truck.ply")
# Let's generate some random noise and add it to the morton
# encoded points
offsets = np.random.randn(*pts.shape) * 0.02
# quantize points and offsets to bins of size 1/128
# NOTE: quantized point coordinates must lie between -1048576 and 1048576
eps = 1.0 / 128.0
pts_quantized = (pts / eps).astype(np.int32)
offsets_quantized = (offsets / eps).astype(np.int32)
# Convert points and query points to morton codes
# morton_codes has shape [pts.shape[0],] (one code per point)
morton_codes = pcu.morton_encode(pts_quantized)
# Convert offset to morton codes
offset_codes = pcu.morton_encode(offsets_quantized)
# Add noise offsets in Morton space
noisy_codes = pcu.morton_add(morton_codes, offset_codes)
# Subtract out the noise to recover the original points
denoise_codes = pcu.morton_subtract(noisy_codes, offset_codes)
assert np.all(denoise_codes == morton_codes)