Finding Closest Points Between Point Clouds and Meshes
You can easily find the closest point on a mesh to any 3D point in space with Point-Cloud-Utils.
import point_cloud_utils as pcu
# Load a mesh stored in my_mesh.ply:
# v is a NumPy array of coordinates with shape (V, 3)
# f is a NumPy array of face indices with shape (F, 3)
v, f = pcu.load_mesh_vf("bunny.ply")
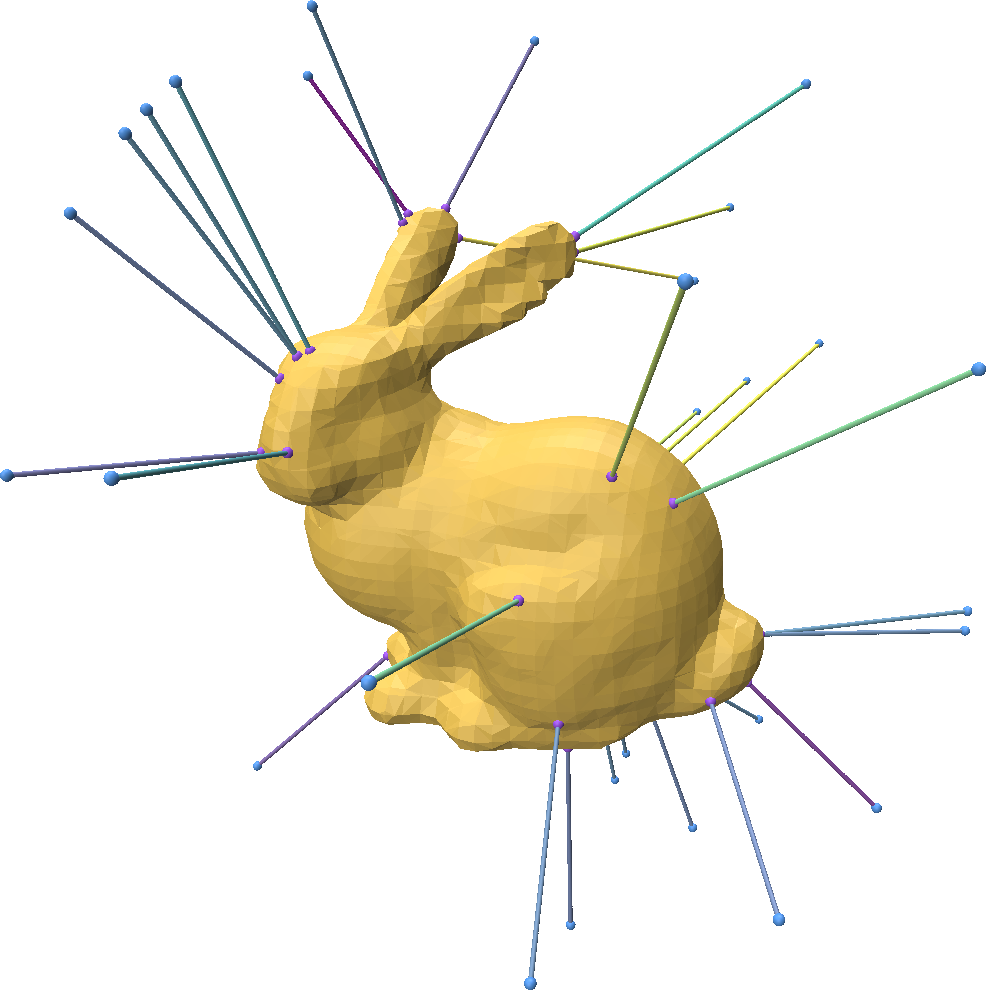
# Generate random points on a sphere around the shape
p = np.random.randn(33, 3)
p /= np.linalg.norm(p, axis=-1, keepdims=True)
# Compute the shortest distance between each point in p and the mesh:
# dists is a NumPy array of shape (P,) where dists[i] is the
# shortest distnace between the point p[i, :] and the mesh (v, f)
dists, fid, bc = pcu.closest_points_on_mesh(p, v, f)
# Interpolate the barycentric coordinates to get the coordinates of
# the closest points on the mesh to each point in p
closest_pts = pcu.interpolate_barycentric_coords(f, fid, bc, v)
Representing mesh-surface samples in Point Cloud Utils
Point Cloud Utils returns samples on the surface of a mesh using Barycentric Coordinates. i.e. each sample is encoded as:
- The index of the mesh face containing it (usually referred to as
fid) - The barycentric coordinates of the point within that face (usually referred to as
bc)
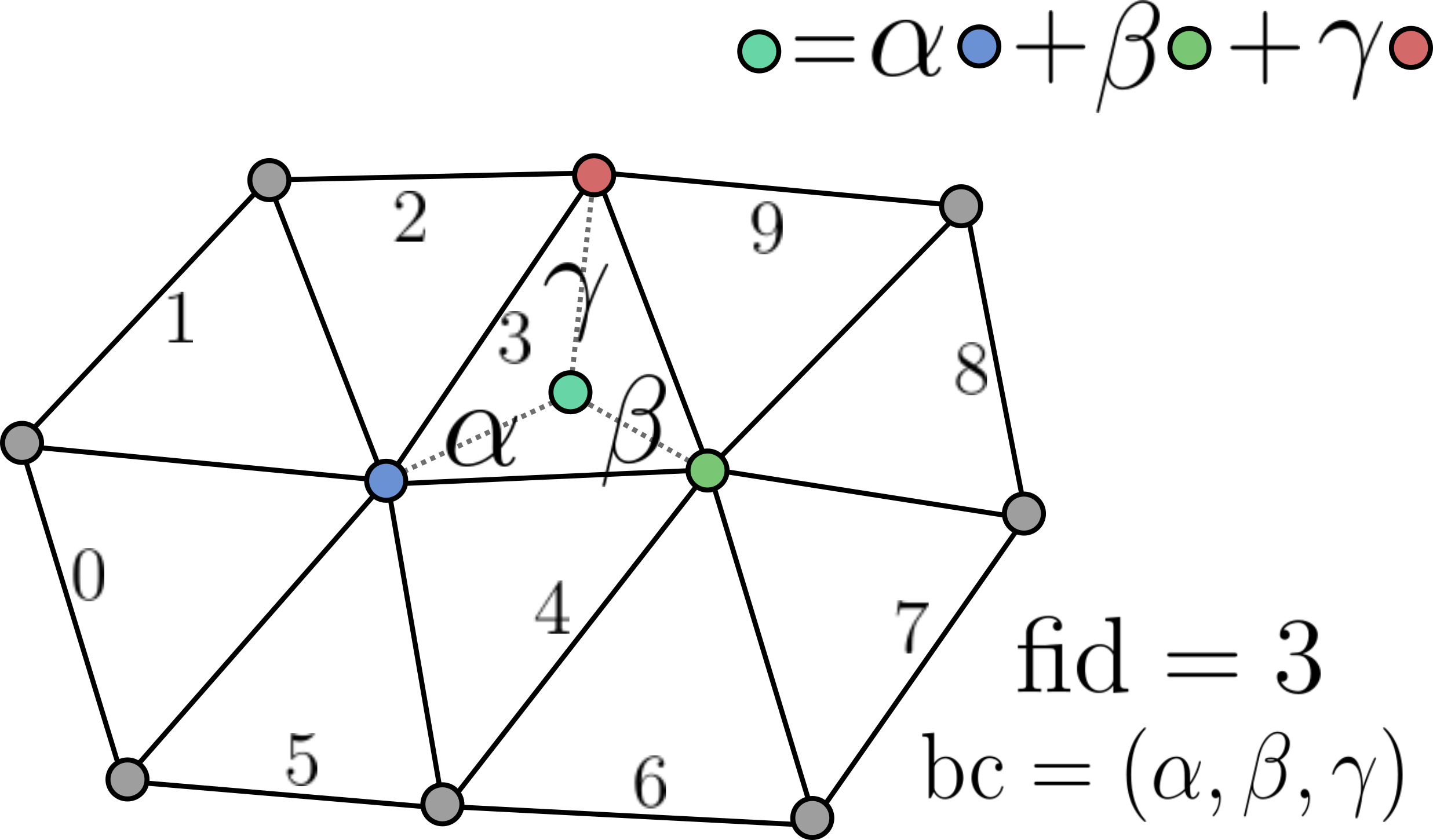
To recover vertex quantities from fid, bc pairs use the function pcu.interpolate_barycentric_coords(f, fid, bc, vertex_quantity)