Generating Point Samples on a Mesh
Point Cloud Utils provides tools for generating point samples on a triangle mesh.
Representing mesh-surface samples in Point Cloud Utils
Point Cloud Utils returns samples on the surface of a mesh using Barycentric Coordinates. i.e. each sample is encoded as:
- The index of the mesh face containing it (usually referred to as
fid) - The barycentric coordinates of the point within that face (usually referred to as
bc)
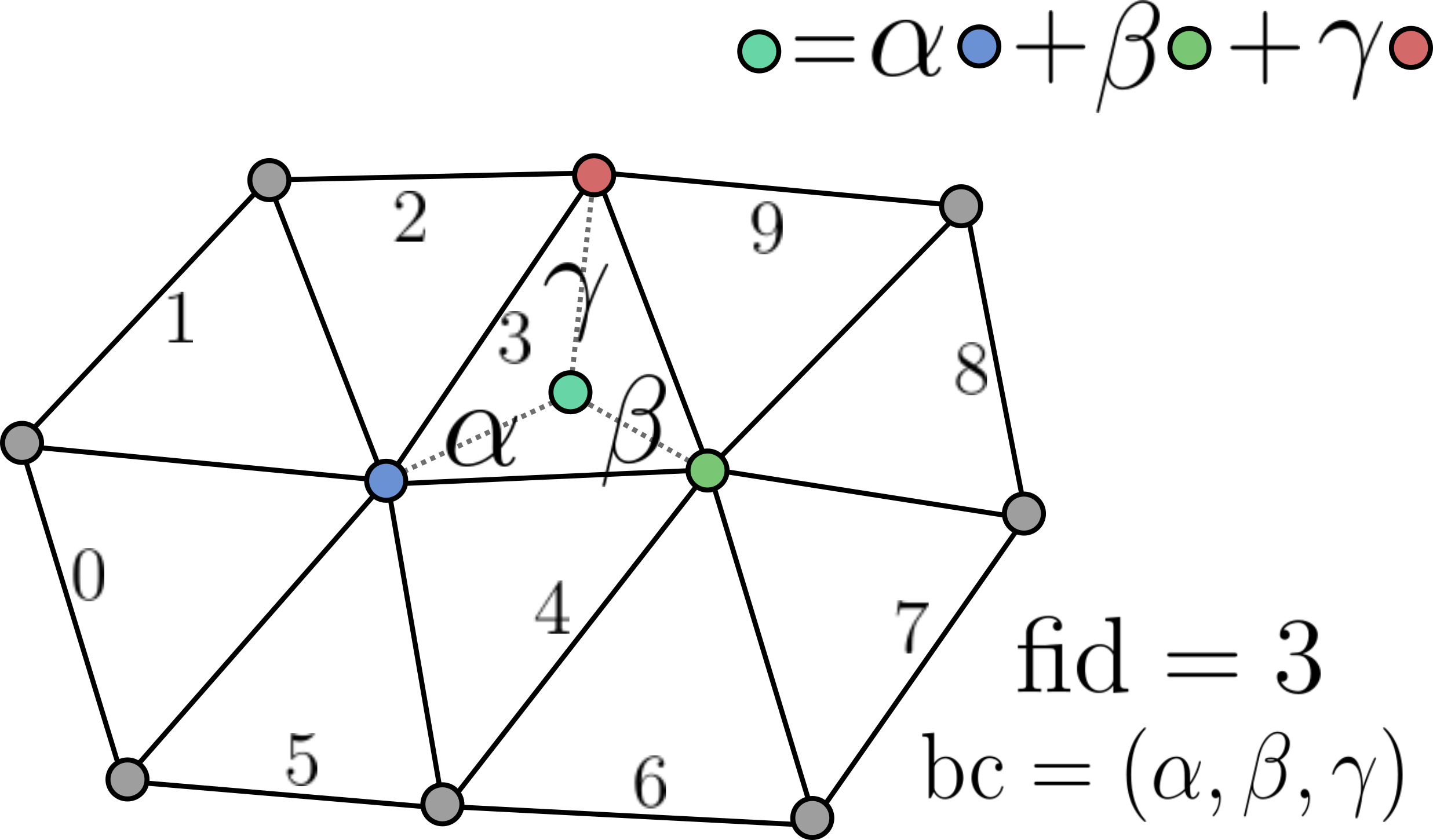
To recover vertex quantities from fid, bc pairs use the function pcu.interpolate_barycentric_coords(f, fid, bc, vertex_quantity)
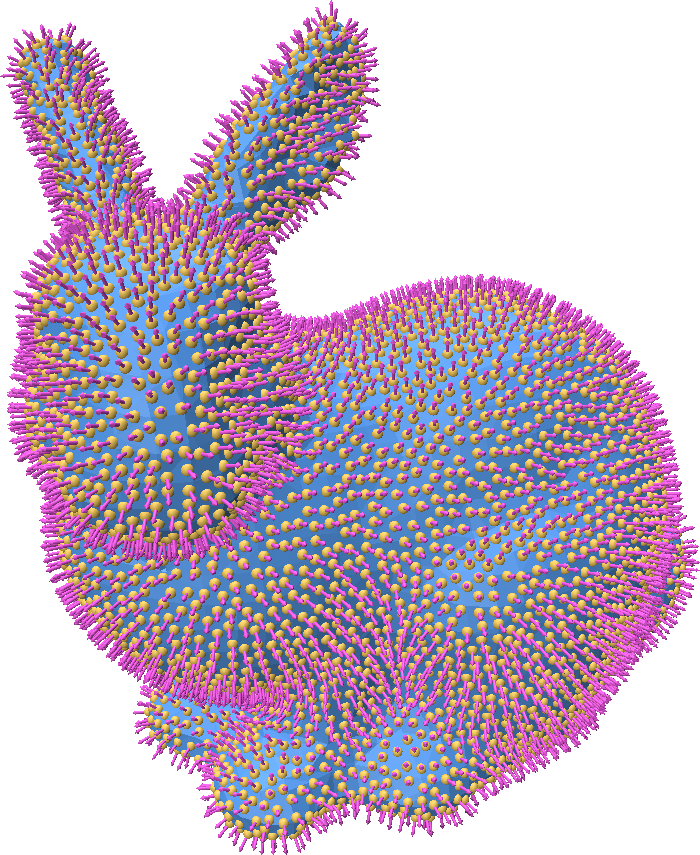
Generating random samples on a mesh
We often want to sample points uniformly at random on a 3D surface. Point Cloud Utils provides a simple function for generating iid point samples such that each sample has equal probability of landing anywhere on the surface.
import point_cloud_utils as pcu
# v is a [n, 3] shaped NumPy array of vertices
# f is a [m, 3] shaped integer NumPy array of indices into v
# n is a [n, 3] shaped NumPy array of vertex normals
v, f, n = pcu.load_mesh_vfn("bunny.ply")
# Generate barycentric coordinates of random samples
num_samples = 1000
fid, bc = pcu.sample_mesh_random(v, f, num_samples)
# Interpolate the vertex positions and normals using the returned barycentric coordinates
# to get sample positions and normals
rand_positions = pcu.interpolate_barycentric_coords(f, fid, bc, v)
rand_normals = pcu.interpolate_barycentric_coords(f, fid, bc, n)
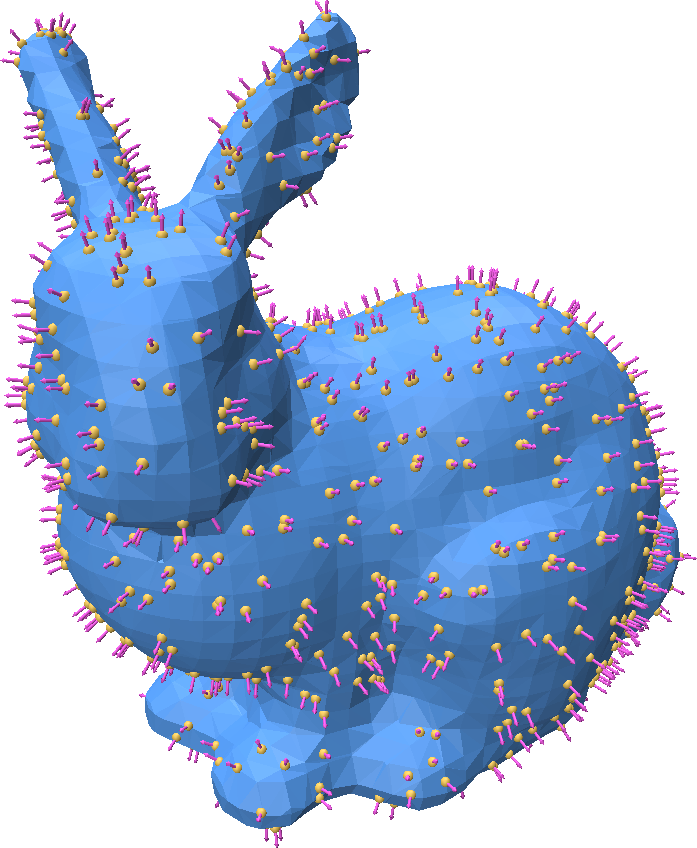
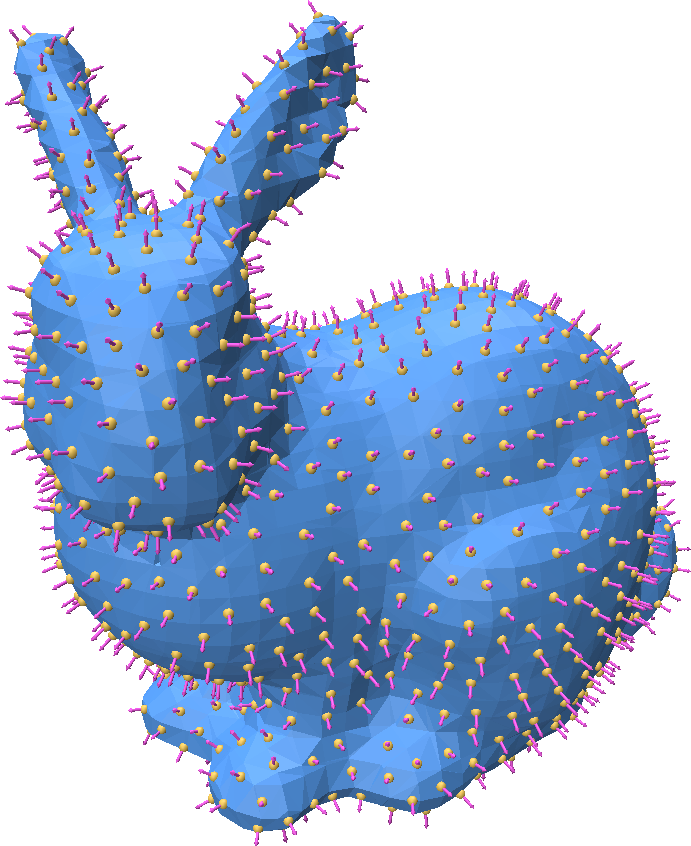
Generating blue-noise random samples on a mesh
We may want to sample a surface in a random way such that the samples are evenly spaced apart. Such a distribution of points is called a "blue noise" distribution. Formally, this means that the expected distance between points on the surface is some constant. i.e. for a set of points \(P\): $$ \mathbb{E}_{x \in P} ||x - \text{nearest_neighbor}(x)|| = \epsilon $$ This can be achieved with Poisson Disk Sampling. Point cloud utils supports sampling a mesh such that there are either (1) a target number of points or (2) such that the points are separated by some radius.
import point_cloud_utils as pcu
import numpy as np
# v is a [n, 3] shaped NumPy array of vertices
# f is a [m, 3] shaped integer NumPy array of indices into v
# n is a [n, 3] shaped NumPy array of vertex normals
v, f, n = pcu.load_mesh_vfn("bunny.ply")
### Option 1:
### Generating points according to a blue noise distribution with a target number of points
### NOTE: The number of returned points may not be exactly 1000
target_num_pts= 1000
# Generate barycentric coordinates of random samples
fid, bc = pcu.sample_mesh_poisson_disk(v, f, num_samples=target_num_pts)
# Interpolate the vertex positions and normals using the returned barycentric coordinates
# to get sample positions and normals
rand_positions = pcu.interpolate_barycentric_coords(f, fid, bc, v)
rand_normals = pcu.interpolate_barycentric_coords(f, fid, bc, n)
### Option 2:
### Generating points according to a blue noise distribution with a target nradius separating each point
target_radius = np.linalg.norm(p.max(0) - p.min(0)) * 0.01 # 1% of the bounding box radius
# Generate barycentric coordinates of random samples
fid, bc = pcu.sample_mesh_poisson_disk(v, f, num_samples=-1, radius=target_radius)
# Interpolate the vertex positions and normals using the returned barycentric coordinates
# to get sample positions and normals
rand_positions = pcu.interpolate_barycentric_coords(f, fid, bc, v)
rand_normals = pcu.interpolate_barycentric_coords(f, fid, bc, n)